1 安装docker,vscode 和VcXsrv
请自己去网上找吧(
Docker: Accelerated, Containerized Application Development
Visual Studio Code – Code Editing. Redefined
https://github.com/ArcticaProject/vcxsrv
2 一些docker的概念和命令
2.1 Image和Containers
Image是一个打包好的包含系统,环境。用户和别的一堆东西的镜像。非常好的是这个玩意在构建好之后就是只读的,对,猜你在找:
而镜像在运行之后就能在其上方生成一个容器,镜像和容器就如同面向对象的类和实例。对于此例而言,我们要一个ubuntu18系统装好ros的镜像来部署。
2.2 下载镜像,生成容器
首先我们可以在Explore Docker’s Container Image Repository | Docker Hub上面找到各种各样的镜像文件,然后就能部署了。
此例中我们使用这个大佬的镜像。
docker run -dit --name=ros_melodic -v d:/home/d -e DISPLAY=host.docker.internal:0.0 fishros2/ros:melodic-desktop-full使用run 命令来下载镜像并且直接运行容器
当然也可以pull命令下下来再使用run
docker pull fishros2/ros:melodic-desktop-full
docker run ros_melodic3 愉快使用
先愉快启动容器
docker run ros_melodic
/bin/bash然后你就能用roscore啦
进入已经启动的容器我们使用 ps -a
PS C:\Users\m1573> docker ps -a
CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMES
be7c44aec2b9 fishros2/ros:melodic-desktop-full "/bin/bash" 5 hours ago Exited (0) 5 hours ago pensive_sinoussi
9a392f29a964 fishros2/ros:melodic-desktop-full "/bin/bash" 5 hours ago Up 51 minutes
ros_melodic
3545d3e880fb fishros2/ros:humble-desktop "/bin/bash /scripts/…" 6 hours ago Up 51 minutes
d2lros2humble记住container id,使用attach指令来进入容器
PS C:\Users\m1573> docker attach 9a392f29a964
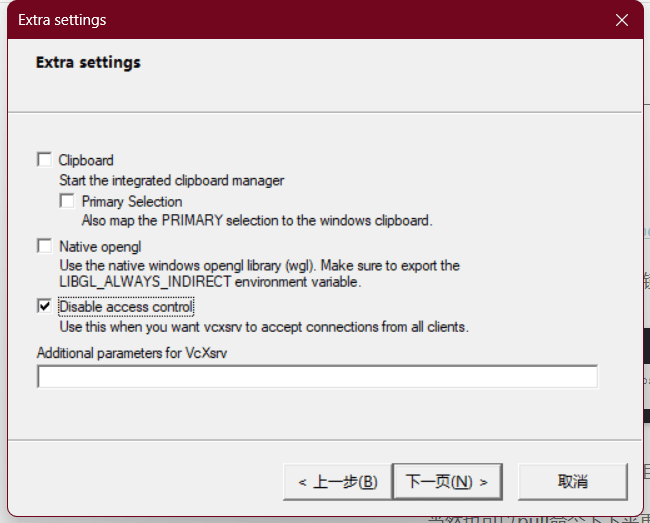
root@9a392f29a964:/#gui通过VcXsrv来实现
打开xlaunch一路下一步直到这里选择最后的选项
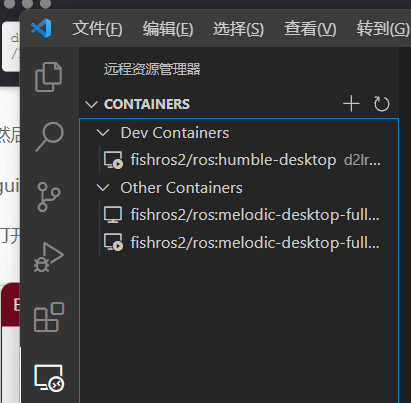
再打开vscode安装Dev Containers这个插件lol
再在左侧远程里面就能看到你的容器了