前言 为了给例会群里搞点乐子,于是决定搞一个东方角色的识别,首先想到的其实就是ConvNext网络,对于这个一百来个角色的分类任务,它足以胜任。 qwqpap/touhou_guess · Hugging Face ConvNext网络介绍 (99+ 封私信 / 90 条消息) ConvNeXt—— 一个能挑战 Vision Transformer…
前言 虽然比赛结果一坨屎,但是不影响我把自己写的部分给opensource 总共包含的部分 数据标注,预处理与增强部分。 模型转换与推理 视觉巡线部分(一坨 第一部分:部署巡线代码 如果只是想看看巡线的效果的话,你需要在车上首先启动底盘节点。 电脑上只有早期早期版本的巡线代码,车上的还没拷贝出来(悲 估计要等两天了。 在一代车与二代车都能运行,但是…
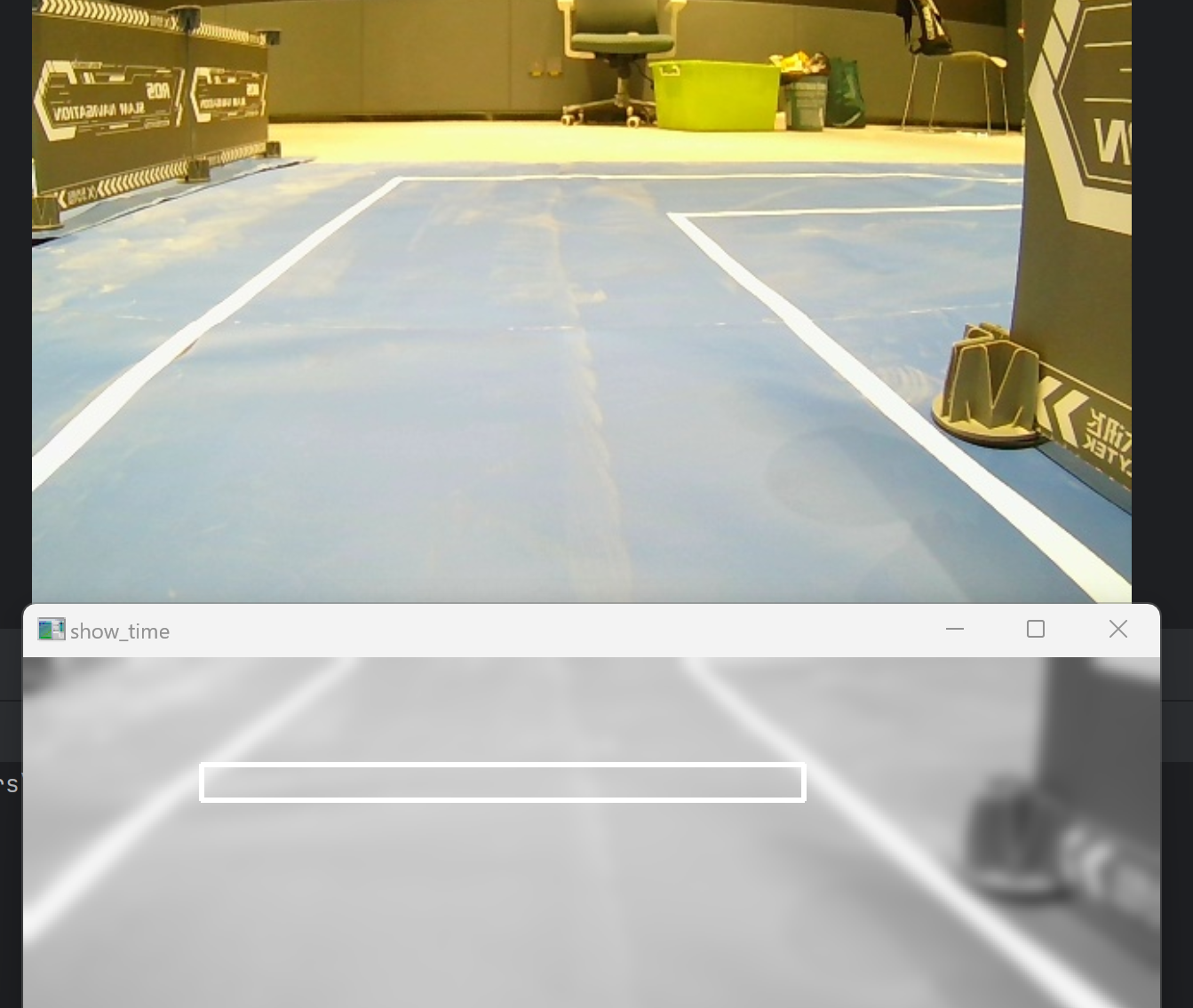
In Past of times, to Read the image from the 'cap' class and not real-time read will cause read the past image. To solve this, all you need to do is change the size of imgae b…
前言 因为讯飞车换了主控,所以需要重新部署一下模型在RK3588上面,写来给学弟们以后用。 顺便一提,这个板子真他妈恶心啊我操。 部署分为三个部分,训练,转换与推理,我们一步一步来。 训练 选择你的版本 因为很多神秘的原因,我们不得不使用某一特定版本输出的权重文件才能够在最后一步推理的时候成功,所以这一步至关重要,需要这个仓库的内容。 airock…
Before the start The purpose of doing this is finish the 19th Xun Fei smart car track line following part job. The approach to accomplish this involves resizing and cropping t…
前言 SLAM写不出来,整个纯视觉凑合凑合得了 main import cv2 import numpy as np import time import numba class FindMiddleLine: def __init__(self, raw_img): self.raw_img = raw_img def find_line(sel…
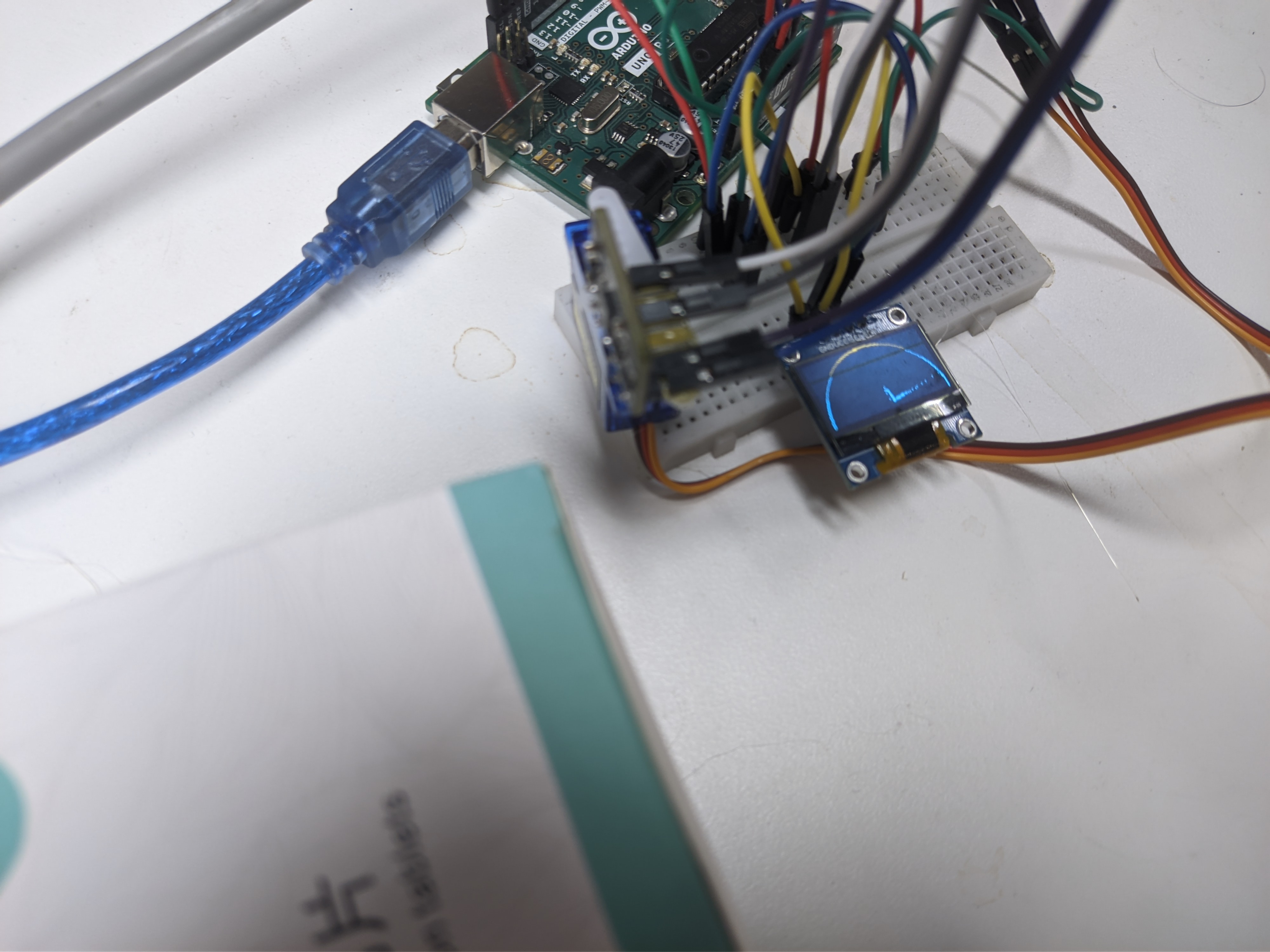
前言:用arduino 和舵机和激光测距搓的,具体实现明天再写,好困啊\ Part1 什么是激光雷达 雷达很好理解(这里不讨论相控阵那种怪物),想象成旋转的测距仪。用电磁波发射与返回的时间差测得距离,而波长变化的测量甚至可以使用开普勒效应来得知被测物体的速度。 而我们因为没有能够在实验室这么小范围内还能正常定向发射的电磁波原(有也买不起,买得起也会…
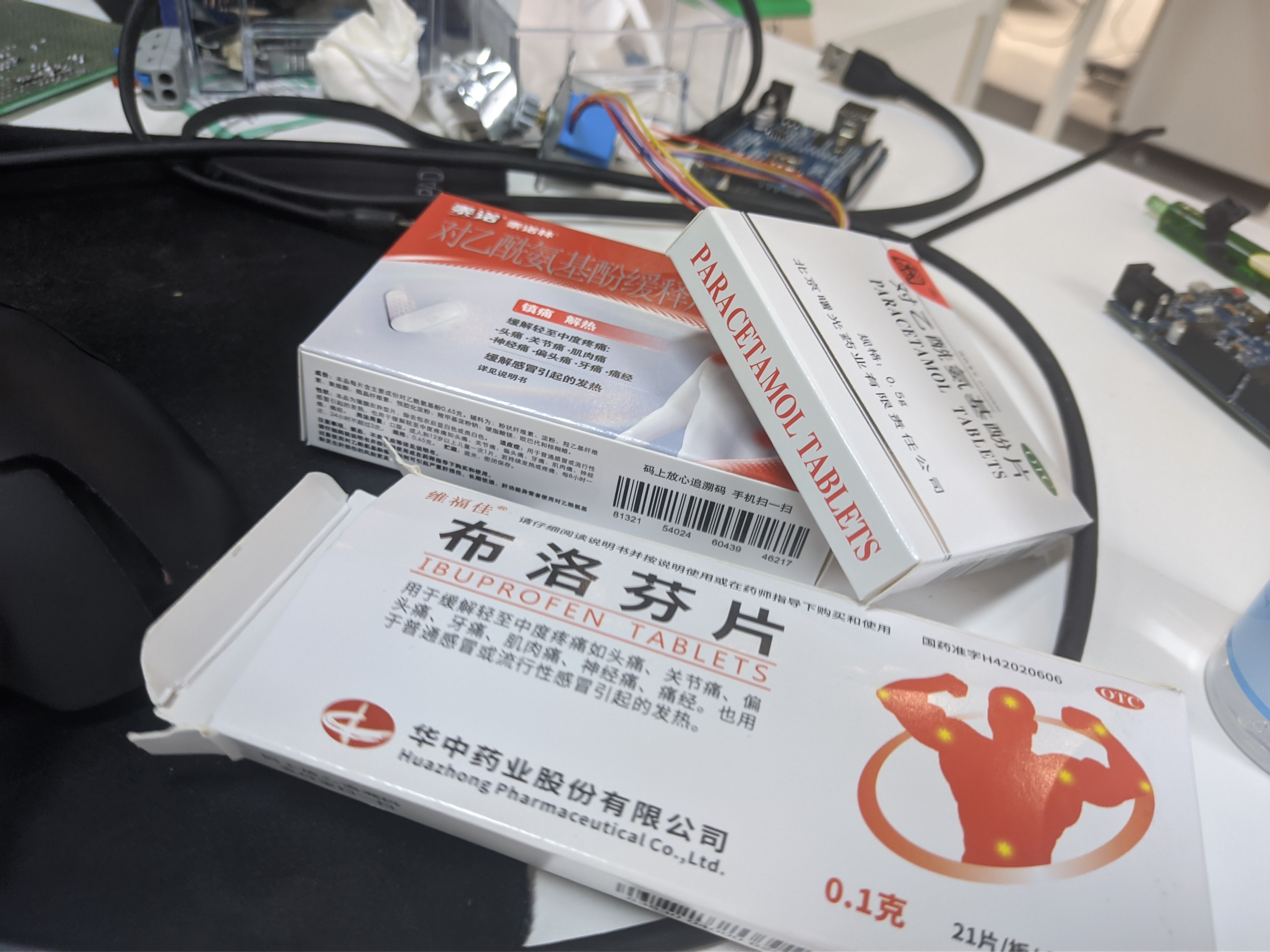
前言: 具体使用请查看我的github仓库: https://github.com/qwqpap/auto_maker 再需要yolo识别物体之前,通常需要漫长的标注过程,而本程序主打一个自动化 把目标图片放进以目标名字命名的文件夹 把目标名字文件夹放在images文件夹下面 确保每个类别的图片数量是一致的 把背景图片放在back文件夹 Part …
0.0 Readme 本文纯属我自己当笔记用,估计不会很有用吧(笑 1 ROS前置工作 通常各种教程这个时候就会要求用虚拟机或者双系统了,但是我一直觉得这是一个极其令人不解的行为,因为反正是学习,跑的都是仿真,装个双系统也没什么用,还要花掉很大一块硬盘空间,所以这里使用Docker在windows11下面部署ros的虚拟环境,那么图形化就使用vsc…
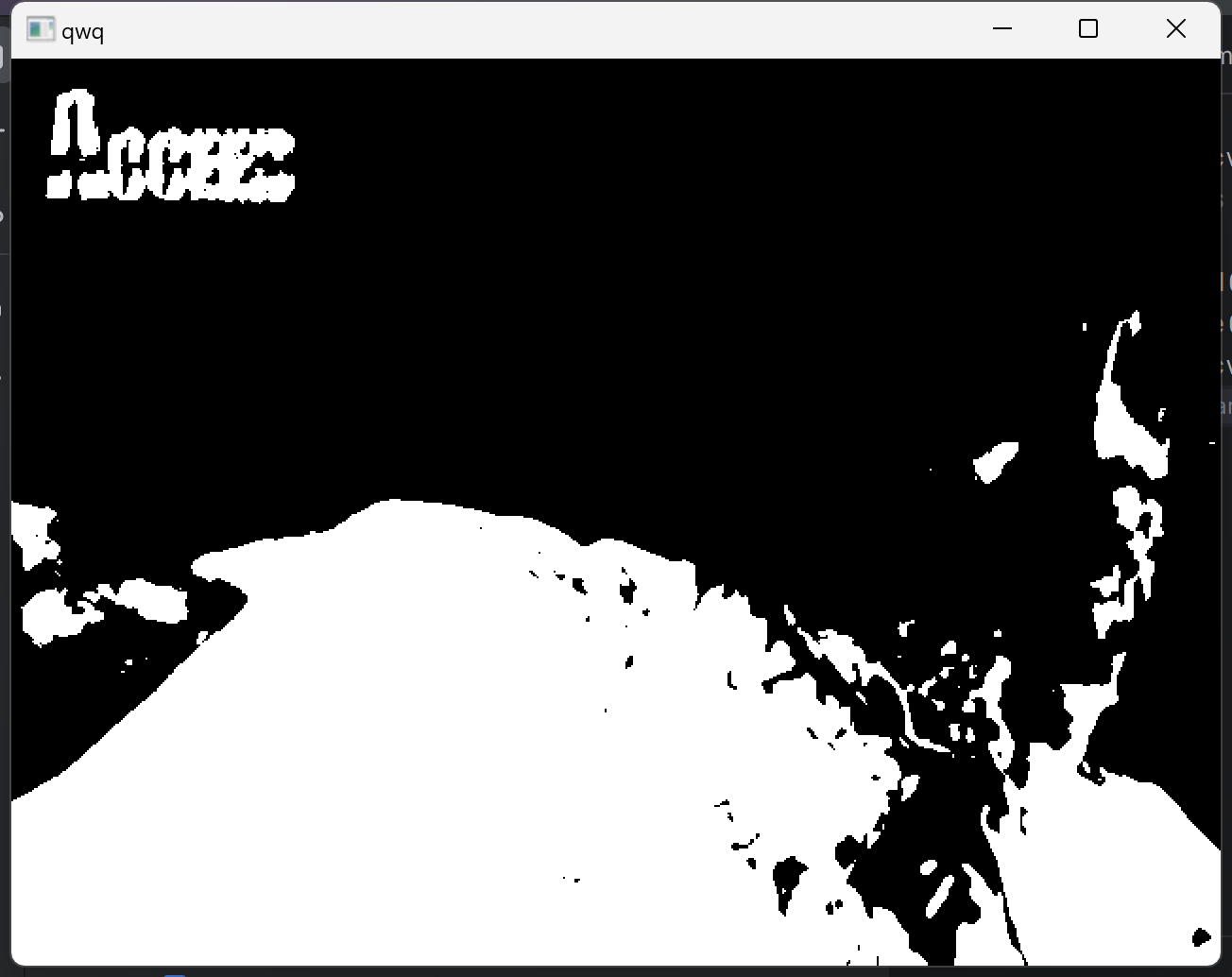
写在前面 这是一坨屎,主要依靠局部大津法二值化与hsv颜色识别来共同筛选跑道。我绝对不会说这是智能车没拿奖剩下的代码 文章结构 python - opencv库的安装与使用 hsv图像的颜色筛选 大津法的原理,不足与局部大津法 通过直方图识别像素数量 识别,卡死和优化 可能的改良方向:卷积的初识 第一部分:python opencv安装与使用 这里…