前言
其实是这个B课重修了,正好考完研仔细研究一下到底在说什么事情,也借这个机会好好复习一下一些基本的张量表示方法。
张量是怎么来的
标量-0维张量
在最开始的时候,初中物理接触到的东西是非常简单的物理量,举一个小例子
\rho \cdot V =m
对于均匀连续物体的密度与质量,满足以上一个简单的表达式。
我们会说密度与质量都是一个标量,标量代表着它没有任何的方向性,是一个很单纯的数字。
那我们更进一步,注意到这个式子
I=U \cdot (\frac{1}{R})似乎也是一个标量表达式,但是隐隐约约似乎还记得电流是有方向的,于是我们引入带有两个方向的电场强度这个变量。
矢量-1维张量
对于经典的:物体的动量,我们还记得这个式子
\overrightarrow{P} = m\overrightarrow{v}这个式子中动量与速度都是一个带有方向与大小的矢量。
矢量我们可以给它写开,比如三维情况,速度就会有三个分量,二维就有两个,但是注意
我们说的现实世界的维度和张量的维度没有任何关系,此处的矢量依旧是一个一维的张量。
二维张量
\vec{J} = \sigma \vec{E}其中σ是电导率这个单位。
所以这个时候需要思考的是,电导率要如何表达出来。
对于各向同性材料,不难想象,电流的方向与电场的方向一定是一致的,也就是说σ可以是一个简单的数字就好。
但是我们假设(实际也确实有这种材料)一种材料,其在x方向上拥有良好电导性,y方向完全不具备导电性。
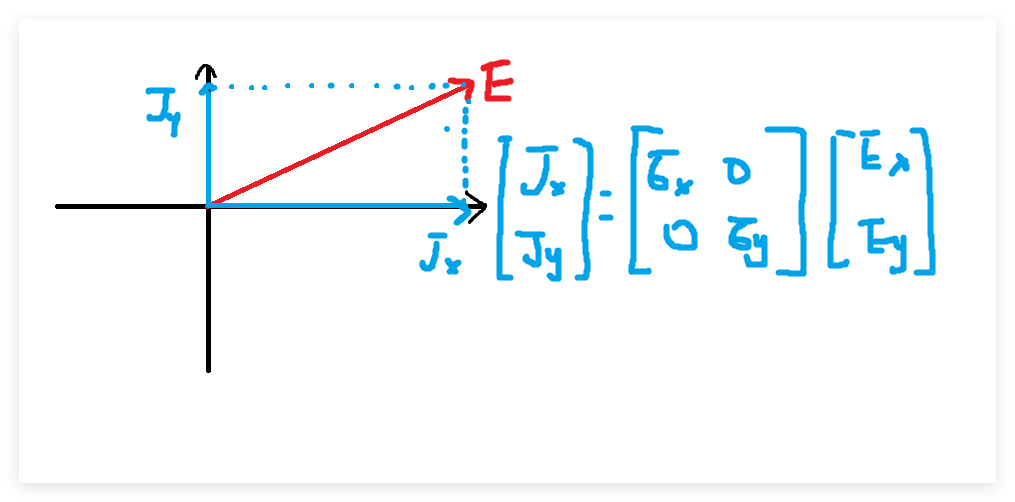
如图,不难发现需要两个电导率相关的参数来表示这个线性变换。
但是这两个0它应该是0吗?
学过线性代数的好厚米可以瞬间发现,我们所选的坐标正好是矩阵的基向量组合,并不具有很好的普遍性,于是我们换一个普遍情况来看看:
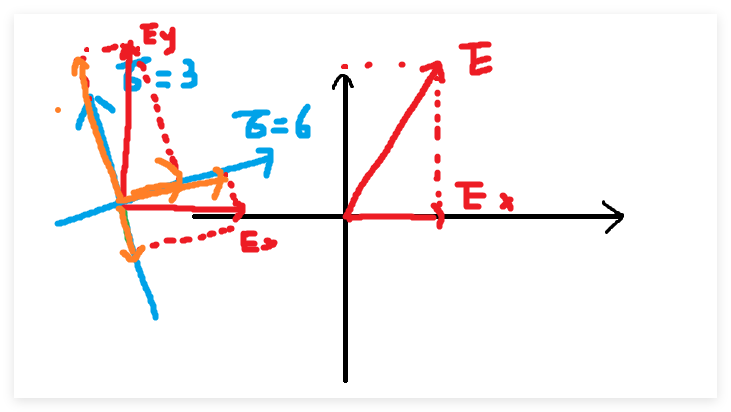
此时我们注意到,对于任意的x方向与y方向的电场强度,任意一个方向的电场强度都会同时在坐标轴的两个方向产生一个不同的电流强度。
如果没有看懂,也能注意到图上至少出现了四个变换后的电流强度,如何描述这种变换呢。
\begin{bmatrix}
J_x\\J_y
\end{bmatrix} = \begin{bmatrix}
\sigma_{xx} & \sigma_{xy} \\
\sigma_{yx} &\sigma_{yy}
\end{bmatrix}
\begin{bmatrix}
E_x \\
E_y
\end{bmatrix}注意到此时σ是一个下标含有两个坐标的分量,让我们用矩阵乘法来把这个表达式拆开
\begin{pmatrix} J_x \\ J_y \end{pmatrix} = \begin{pmatrix} \sigma_{xx} & \sigma_{xy} \\ \sigma_{yx} & \sigma_{yy} \end{pmatrix} \cdot \begin{pmatrix} E_x \\ E_y \end{pmatrix} \implies
\begin{cases}
J_x = \sigma_{xx} E_x + \sigma_{xy} E_y \\
J_y = \sigma_{yx} E_x + \sigma_{yy} E_y
\end{cases}最好的看待方式就是发现其实
\sigma_{xy} 就是在说:Y方向的电场强度会对x方向的电流强度产生如何之影响。
特别特别要注意的是,这个地方的“二维张量”说的是任意一个分量的维度。
同样是上面这个式子,在三维中的表达式如下,但是我们依然注意到对于x方向的电导率是一个平面,也就是x,y,z三个方向的电场强度在这个平面上的影响,这并不会受到具体选择几维坐标而改变
\vec{J} = \boldsymbol{\sigma} \cdot \vec{E} \implies
\begin{pmatrix} J_x \\ J_y \\ J_z \end{pmatrix} = \begin{pmatrix}
\sigma_{xx} & \sigma_{xy} & \sigma_{xz} \\
\sigma_{yx} & \sigma_{yy} & \sigma_{yz} \\
\sigma_{zx} & \sigma_{zy} & \sigma_{zz}
\end{pmatrix} \cdot \begin{pmatrix} E_x \\ E_y \\ E_z \end{pmatrix}
举一个力学中常见的概念:
应力
在弹塑性力学中,应力是如下规定:
\overrightarrow{p}=\lim_{\bigtriangleup S \to 0} \frac{\bigtriangleup \overrightarrow{F} }{\bigtriangleup S} 可以注意到这个地方的应力应该是一个带有方向的矢量。
在材料力学中知道,一个力在切向与轴向的作用效果是完全不同的(考虑一下切蛋糕和压扁蛋糕似乎不太一样)
所以我们需要描述的是,任意一个力要如何表示为一个应力。
对其在各个方向上分解后,任意方向力依然会同时作用于三个方向,所以我们需要引入应力的张量表示法:
当然这里涉及线性代数与应力不变量的内容可以参看本站内塑性力学相关笔记
编辑文章 「塑性力学期末速通速查手册」 ‹ ベルベットルーム — WordPress
但是总之我们会得到这样一个式子
[\sigma_{ij}]= \begin{bmatrix}
\sigma_x & \tau_{xy} & \tau_{xz}\\
\tau_{yx} & \sigma_y &\tau_{yz} \\
\tau_{zx} & \tau_{zy}&\sigma_z\end{bmatrix}这个地方的σx其实是把两个x写到一起了,用τ来代表这个是切应力的意思,当然这里不用关注力学细节,主要是要知道二维的张量在一个变换中能够把一个矢量变成另一个矢量。
一些至关重要的性质
- 张量与你选择的坐标系没有关系
- 张量的变换是线性变换
这个看着也很眼熟,我们从一点应力状态中的“应力不变量”来展开稍微说说,当然这部分不是很重要,只是我想说说。
由于切应力的对称性质,我们知道应力张量在矩阵中是一个实对称矩阵,实对称矩阵我们可以化为标准型,而关于主应力有以下之性质
经过任意一点P的某一斜面上的切应力为零,则该斜面上的正应力成为主应力,该斜面的法线方向成为主应力方向。
所以其实主应力就是把原有应力张量化为标准型矩阵后的三个特征向量和特征值,特征向量就是正交的主应力方向,而特征值就是主应力大小,所谓应力不变量也就是相似矩阵所得到的性质。
爱因斯坦求和准则
因为懒狗物理学家都不爱写算式,为了大大方方偷懒,有一些必须学习的简写规则与方法。
基本上我们有四条准则:
第一条:哑指标与自由指标
考虑以下表达式
A_{ij}B_j =C_i在每个单项式中最多出现了两次的下标 j 就是哑指标,而只出现了一次的 i 代表自由指标。
其代表了以下之求和表达式:
\left\{\begin{matrix}A_{11}B_1 +A_{12}B_2+A_{13}B_3 =C_1
\\A_{21}B_1 +A_{12}B_2+A_{13}B_3 =C_2
\\A_{31}B_1 +A_{12}B_2+A_{13}B_3 =C_3
\end{matrix}\right.第二条:自由指标不代表求和,代表出现的次数,不能替换为别的字母
第三条:任何一个单项式中不得出现两个以上的相同指标:
以下形式是绝对不允许的:
a_{ij}b_{ii}这么写包写错了的。
当然虽然没涉及到 但是上标也算在这个范围内
a_{ii}^{ij}依然是不允许的情况
第四条 对于等式,左右的自由指标必须是一致的。
一些别的约定
乘法表达式
考虑以下表达式
a_{ij}(b_i+c_j+d_k)在处理括号的时候,需要优先把括号内的东西直接拼在外面,注意不是乘在外面
a_{ij}b_i+a_{ij}c_j+a_{ij}d_k这个时候对于每一个表达式中出现的指标次数进行计数,取每一个指标在最高出现次数的子项中的次数为指标计数,再用这个来代表其类型。
比如上文中i,j都出现了两次,是哑指标,而k出现了一次,是自由指标
对于哑指标可以任意替换其符号,用这个可以实现一点看着像是轮换对称性的操作。
如果出现了两个哑指标,那么一次就应该产生九个子式子。
克罗内克符号
\delta _{ij}=\delta _{i}^j=\left\{\begin{matrix}1 ;i=j
\\0;i\ne j
\end{matrix}\right.这个可以快速筛选出主对角线上面的元素。
通常一个克罗内克符号可以消灭一个哑指标,举个例子
\delta _{ij}X_{ij}=X_{ii}同样的,这个可以用来替换指标:
\delta _{ij}X_{i}=X_{j}两个克罗内克符号可以消灭中间那一个
\delta _{ij}\delta _{jk}=\delta_{ik}